|
| | CollisionShape (const glm::vec3 &position=glm::vec3(0.0f), const glm::vec3 &rotation=glm::vec3(0.0f), const glm::vec3 &scale=glm::vec3(1.0f), bool visible=false) |
| void | draw (float deltaTime) override |
| void | enable () |
| void | disable () |
| bool | isEnabled () const |
| virtual bool | collisionCheck (const CollisionShape &mesh, glm::vec3 velocity)=0 |
| | Fast boolean check if this shape intersects with another.
|
| virtual CollisionResult | collisionCheckDetailed (const CollisionShape &mesh, glm::vec3 velocity, bool calculateNormal=false)=0 |
| | Detailed collision check returning overlap status, normal, and reflection vectors.
|
| | Mesh () |
| | Mesh (const glm::vec3 &position) |
| | Mesh (const glm::vec3 &position, const glm::vec3 &rotation) |
| | Mesh (const glm::vec3 &position, const glm::vec3 &rotation, const glm::vec3 &scale) |
| virtual | ~Mesh () |
| void | setVertices (const std::vector< float > &vertices) |
| void | setMaterial (const std::shared_ptr< Material > &material) |
| | Applies a material to the entire mesh and all its submeshes.
|
| const std::vector< SubMesh > & | getSubMeshes () const |
| std::shared_ptr< Material > | getMaterial () |
| GLuint | getVao () const |
| GLsizei | getNumVertices () const |
| virtual void | init (GLuint shader) |
| | Initializes OpenGL buffers (VAO, VBO) for the mesh.
|
| int | getId () const |
| void | setVertexWave (bool isVertexWave) |
| bool | isVertexWave () const |
| void | hide () |
| void | show () |
| void | setVisible (bool visible) |
| bool | isVisible () const |
| | Geometry () |
| | Geometry (const glm::vec3 &position) |
| | Geometry (const glm::vec3 &position, const glm::vec3 &rotation) |
| | Geometry (const glm::vec3 &position, const glm::vec3 &rotation, const glm::vec3 &scale) |
| virtual | ~Geometry () |
| virtual void | setPosition (const glm::vec3 &position) |
| virtual void | setRotation (const glm::vec3 &rotation) |
| virtual void | setScale (const glm::vec3 &scale) |
| virtual void | setRotationDegrees (const glm::vec3 &rotationDegrees) |
| glm::mat4 | getRotationXMatrix () const |
| glm::mat4 | getRotationYMatrix () const |
| glm::mat4 | getRotationZMatrix () const |
| glm::mat4 | getPositionMatrix () const |
| glm::mat4 | getRotationMatrix () const |
| glm::mat4 | getScaleMatrix () const |
| glm::mat4 | getModelMatrix () const |
| | Calculates local transformation matrix.
|
| glm::mat4 | getWorldPositionMatrix () const |
| glm::mat4 | getWorldRotationMatrix () const |
| glm::mat4 | getWorldScaleMatrix () const |
| glm::mat4 | getWorldModelMatrix () const |
| | Calculates global transformation matrix by multiplying all ancestor matrices.
|
| glm::vec3 | getPosition () const |
| glm::vec3 | getRotation () const |
| glm::vec3 | getScale () const |
| glm::vec3 | getRotationDegrees () const |
| glm::vec3 | getWorldPosition () const |
| glm::vec3 | getWorldRotation () const |
| glm::vec3 | getWorldScale () const |
| glm::vec3 & | position () |
| glm::vec3 & | rotation () |
| glm::vec3 & | scale () |
| glm::vec3 | worldPosition () const |
| glm::vec3 | worldRotation () const |
| glm::vec3 | worldScale () const |
| bool | setParent (Geometry *newParent) |
| | Attaches this object to a new parent in the scene graph.
|
| Geometry * | getParent () const |
| std::vector< Geometry * > | getChildren () const |
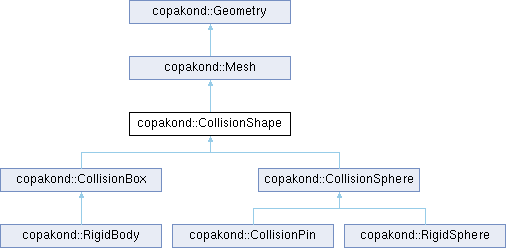
Base class for physics colliders, acting as an invisible (or debug) mesh.